

dz̸����Դ������ع���ϵͳBMS����
ʱ��:2018-10-30 17:23��Դ:��ع�ҵ�� ����:�ۺϱ���
���:
��

�綯�����Ķ������������������������ϵͳBMS(Battery Management System)�������еĺ��ģ�������Ƶ�صij��ͷŵ��Լ�ʵ�ֵ��״̬����ȹ��ܡ�
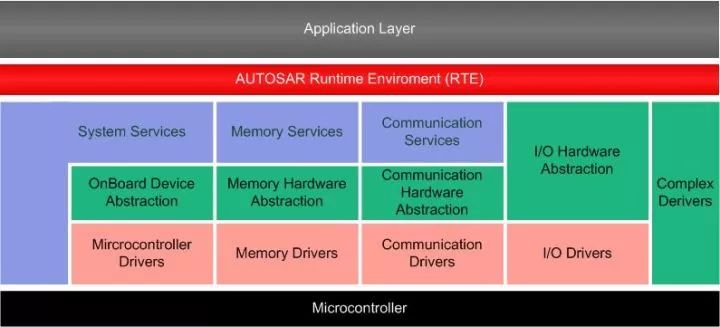
���˾BMS���ıȽϺõ������硢��½���¶�����AVL��FEV�ȵȣ����ڻ����϶��ǰ���AUTOSAR�ܹ��Լ�ISO26262���ܰ�ȫ��Ҫ���������������ܸ��࣬�ɿ��Ժ;���Ҳ�ϸߡ�
���ںܶ�������Ҳ��������������BMS��Ʒ��Ӧ�ã�ǰ���ڹ��ܺ������������һ����˾�����Զ�������Ź��ڵ�غ�BMS�����Ŀ��ٷ�չ�����������С��ϣ�����õĽ����ܹ�ʵ�ֳɹ���������Խ��
BMS��Ҫ����Ӳ�����ײ�������Ӧ�ò����������֣���������������ϸ����һ��
Ӳ��
1������
Ӳ������ƺ;���ѡ��Ҫ������������ϵͳ�Ĺ�������ͨ�õĹ�����Ҫ�����ɼ�����(���ѹ���������¶Ȳɼ�)�����ڼ��(CC��CC2)�ͳ�绽��(CP��A+)���̵������Ƽ�״̬��ϡ���Ե��⡢��ѹ��������ײ��⡢CANͨѶ�����ݴ洢��Ҫ��
2���ܹ�
BMSӲ���ܹ���Ϊ�ֲ�ʽ�ͼ���ʽ��
(1)�ֲ�ʽ��������ʹӰ壬����һ�����ģ���䱸һ���Ӱ壬���������ȱ����������ģ��ĵ�����������12������ɲ���ͨ���˷�(һ�����оƬ��12��ͨ��)������2-3���Ӱ�ɼ����е��ģ�飬���ֽṹһ��Ӱ��о��ж������оƬ���ŵ���ͨ�������ʽϸߣ���ʡ�ɱ�;
(2)����ʽ�ǽ����еĵ����������е�һ���İ����У�����оƬͨ����������Ҳ���оƬ����оƬ֮����Բ��þջ���ͨѶ����·�����Լ���Ʒ�ɱ���Ϊ���ͣ�ֻ�����еIJɼ������������ӵ������ϣ���BMS�İ�ȫ�����������ս�����Ҿջ���ͨѶ�ȶ��Է���Ҳ���ܴ������⡣
3��ͨѶ��ʽ
����оƬ����оƬ֮����Ϣ�Ĵ�����CANͨѶ�;ջ���ͨѶ���ַ�ʽ������CANͨѶ��Ϊ�ȶ�����������Ҫ���ǵ�ԴоƬ�������·�ȳɱ��ϸߣ��ջ���ͨѶʵ������SPIͨѶ���ɱ��ܵͣ��ȶ��Է�����Խϲ�������ŶԳɱ�����ѹ��Խ��Խ�ܶ೧�Ҷ�����ջ����ķ�ʽת�䣬һ������2����������ջ�������ǿͨѶ�ȶ��ԡ�
4���ṹ
BMSӲ��������ԴIC��CPU������IC������IC������IC�����������ѹ����RTC��EEPROM��CANģ��ȡ�����CPU�Ǻ��IJ�����һ���õ���Ӣ�����TCϵ�У���ͬ�ͺŹ����������죬����AUTOSAR�ܹ�������Ҳ��ͬ������IC������Ҫ�����ء����š����������ȣ������ɼ������ѹ��ģ���¶��Լ���Χ���þ����·�ȡ�
�ײ�����
����AUTOSAR�ܹ����ֳ�����ͨ�ù���ģ�飬���ٶ�Ӳ��������������ʵ�ֶԲ�ͬӲ�������ã���Ӧ�ò������仯��С��Ӧ�ò�͵ײ���Ҫȷ����RTE�ӿڣ����Ҵ�����Է��濼��DEM(��������¼�����)��DCM (�������ͨ�Ź���)��FIM(������Ϣ����)��CANͨѶԤ���ӿڣ���Ӧ�ò�������á�

Ӧ�ò�����
�����ܹ���Ҫ�����ߵ�ѹ��������������״̬���㣬������ƺ��Ϲ����ȵȡ�
1���ߵ�ѹ����
һ�������ϵ�ʱ������VCUͨ��Ӳ��CAN�źŵ�12V������BMS����BMS����Լ켰���������VCU�����ϸ�ѹָ�BMS���Ʊպϼ̵�������ϸ�ѹ���µ�ʱVCU�����¸�ѹָ����ٶϿ�����12V���µ�״̬��ǹ���ʱ��ͨ��CP��A+�źŻ��ѡ�
2��������
(1)����
�������ɽ������(��220V��Դ)ͨ�����س���������ת��Ϊֱ������س�磬������һ����16A��32A��64A��Ҳ��ͨ�����õ�Դ���г�硣��ͨ��CC��CP�źŻ���BMS����Ӧ��֤�����������������ߡ�����������̱Ƚϼ����չ�����ϸ�涨�������ɡ�
(2)���
�������ֱ��������ֱ������س�磬��ʵ��1C�������߱��ʳ�磬һ��45min�ɳ��80%������ͨ������ĸ�����ԴA+�źŻ��ѣ������п�����̱Ƚϸ��ӣ�ͬʱ����2011��2015�����汾�����ҳ���������Ҷ��ڹ�������δ��ȷ�ļ���ϸ�����ⲻͬҲ�����������������ɼ������ս����˿���������Ǻ���BMS��Ʒ���ܵ�һ��ؼ�ָ�ꡣ
3�����㹦��
(1)SOP(State Of Power)��Ҫ��ͨ���¶Ⱥ�SOC����õ���ǰ��صĿ��ó�ŵ繦�ʣ�VCU���ݷ��͵Ĺ���ֵ������ǰ�������ʹ�á���Ҫ��˿����ͷŵ�������ͶԵ�����ܽ��б����������ڴﵽ��ֹ��ѹǰ���в��ֹ������ƣ���Ȼ����������ʻ���ܲ���һ��Ӱ�졣
(2)SOH(State Of Health)��Ҫ������ǰ��صĽ���״̬��Ϊ0-100%֮����ֵ��һ����Ϊ����80%�Ժ��ر㲻�����á������õ������������仯����ʾ��������ʱ��ͨ��������й������ݹ������ǰ��ص�ʵ���������������ı�ֵ��ΪSOH��ȷ��SOH����ߵ��˥��ʱ����ģ��Ĺ��㾫�ȡ�
(3)SOC(State Of Charge)����BMS���Ŀ����㷨��������ǰ��ʣ������״̬����Ҫͨ����ʱ���ַ���EKF(��չ�������˲�)�㷨���������������(�翪·��ѹ�������������������ĩ����������ͬ�¶ȼ�SOH�µ�����������)����ʱ���ַ��ڱ�֤�����ɼ����������±ȽϿɿ�����³���Բ�ǿ�����ڴ�������ۼƱ������������ԣ���EKF³���Խ�ǿ�����㷨�Ƚϸ��ӣ�ʵ���Ѷȴ�����������һ�㳣�¿�����������6%���ڣ��ڸߵ��º͵��˥��ʱ�Ĺ������ѵ㡣
(4)SOE(State Of Energy)�㷨���ڳ������ڿ����IJ��࣬����ý�Ϊ���㷨������õ���ǰ״̬��ʣ�������������������ı�ֵ���ù�����Ҫ����ʣ��������̹��㡣
4���������
��Ե�صIJ�ͬ�������������Ϊ��ͬ�Ĺ��ϵȼ��������ڲ�ͬ���ϵȼ������BMS��VCU�����ȡ��ͬ�Ĵ�����ʩ�����棬���ʻ�ֱ���жϸ�ѹ�����ϰ������ݲɼ��������Թ��ϡ���������(��������ִ����)��ͨѶ���ϼ����״̬���ϵȡ�
5���������
�������Ϊ�������ڵ��ʹ�ù����в����ĵ�ص��岻һ���ԣ�����ľͰ�̰�ЧӦ�����ͷŵ�ʱ�����������ĵ����ȴﵽ��ֹ�����������ĵ��廹��һ����������δ�ͷų�������ɵ���˷ѡ�
���������������ͱ������⣬���������������Ӷ�ĵ������ٵĵ���ת�ƣ��������������ʧ�����ǽṹ���ӣ��ɱ��ϸߣ����ڵ���Ԫ��Ҫ��Ҳ�ϸߣ������˵��������ṹ���ɱ�Ҳ���˺ֻܶ࣬������������������ʽɢ���˷ѵ���һ�������������100mA���ң����ڹ��ںܶ೧�Ҳ��ñ�������Ҳ����ʵ�ֽϺõľ���Ч����
(���α༭������)



�������������Ľ��������߸��˹۵㣬���й���������ء���ԭ�����Լ����г������ֺ�����δ������֤ʵ���Ա����Լ�����ȫ�����߲������ݡ����ֵ���ʵ�ԡ������ԡ���ʱ�Ա�վ�����κα�֤���ŵ������߽����ο����������к�ʵ������ݡ�
������ע�� ����Դ��XXX�����й�������ˣ�������Ʒ����ת��������ý�壬ת��Ŀ�����ڴ��ݸ�����Ϣ����������������ͬ��۵�Ͷ�����ʵ�Ը���
������Ʒ���ݡ���Ȩ������������Ҫͬ������ϵ�ģ�����һ���ڽ��У��Ա����Ǽ�ʱ������
QQ��503204601
���䣺cbcu@cbcu.com.cn
������ע�� ����Դ��XXX�����й�������ˣ�������Ʒ����ת��������ý�壬ת��Ŀ�����ڴ��ݸ�����Ϣ����������������ͬ��۵�Ͷ�����ʵ�Ը���
������Ʒ���ݡ���Ȩ������������Ҫͬ������ϵ�ģ�����һ���ڽ��У��Ա����Ǽ�ʱ������
QQ��503204601
���䣺cbcu@cbcu.com.cn
����ϲ��
-
��������ʱ���ĵ�ؼ����ϴ�
2022-09-06 09:32 -
��Ԫ﮵�ؼ�ѹ���������о�
2021-06-01 11:37 -
����Դ��ؼ���֮��̬���
2021-04-30 11:02 -
�綯�����Ķ�����ؿ�����������
2021-02-27 13:00 -
Ӱ��綯������ؼ�϶�����ɷ����Ե���������
2020-10-25 15:54 -
����Դ�����Ͼ�﮵���ۺϻ������ܻ������߹ؼ������о�
2020-07-10 10:36 -
��������ʲô��ȱ�㣿
2020-06-18 18:28 -
������ذ�ȫ������ϼ���
2020-06-18 10:07 -
�ȹ���ϵͳ���������ϵ綯������������еģ�
2020-06-11 10:15 -
������ؼ���չ��
2020-05-20 10:11
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ר��


�������
-
��������ʱ���ĵ�ؼ����ϴ�
2022-09-06 09:32 -
��Ԫ﮵�ؼ�ѹ���������о�
2021-06-01 11:37 -
����Դ��ؼ���֮��̬���
2021-04-30 11:02 -
�綯�����Ķ�����ؿ�����������
2021-02-27 13:00 -
Ӱ��綯������ؼ�϶�����ɷ����Ե���������
2020-10-25 15:54 -
����Դ�����Ͼ�﮵���ۺϻ������ܻ������߹ؼ������о�
2020-07-10 10:36 -
��������ʲô��ȱ�㣿
2020-06-18 18:28 -
������ذ�ȫ������ϼ���
2020-06-18 10:07
�����ȵ�
-
2024﮵�����б���
2024-05-24 18:59 -
С����ֵ�����죬������ʱ���������ʹ�˾��
2024-05-20 19:05 -
���﮵���Ŀ��ֹ���ذ��ļ�������ҵ����������ܣ�
2024-05-15 19:12 -
Я�ֶ�������������ҵ5����������Ŀ����/ǩԼ!
2024-05-21 18:46 -
�ذ�������Դͻ���������ã���̬���������������
2024-05-28 18:18 -
Ͷ�ʳ�25��Ԫ�����﮵���ҵ�������������ػ�ѧƷ��Ŀ
2024-05-22 19:20 -
��һ10GWh��Ŀ��������̬��ؾ����ҵ����Ҫ��ã�
2024-05-11 19:17 -
����ʱ�������ǵϡ��д��º���ͬ����ε�����ֵ�����
2024-05-09 18:48

©2017 ��Ȩ���� ��ɫ�ǻ���Դ�����о�Ժ ������̩�Ƽ�������������˾ �а� Power by DedeCms
��ֵ�ɾ���ҵƷ�ƣ��߳�Ϊ���ṩ�������ȵ���Ѷ
��ICP��2024061100��
��ֵ�ɾ���ҵƷ�ƣ��߳�Ϊ���ṩ�������ȵ���Ѷ
��ICP��2024061100��
 �Ź��ں�
�Ź��ں�